"ربات ماهی" با قابلیت شنای گروهی
پیش از این درمورد رباتهایی که پرواز میکنند، با چرخهایشان حرکت میکنند و با یکدیگر در انجام کارها همکاری میکنند شنیدهایم. اما محققان دانشگاه "هاروارد" فراتر از این پیش رفته اند و دست به تولید رباتهایی کوچک زدهاند که در زیر آب مانند ماهیها به صورت گروهی شنا میکنند.
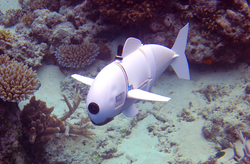
این رباتها موسوم به "بلوباتس" (Bluebots) الهام گرفته از ماهی هستند و هر کدام دارای دو دوربین زاویه دید گسترده و سه الای دی آبی رنگ با قابلیت دید بالا هستند. آنها با حرکت دادن دم و بالههایشان شنا میکنند.
هر ماهی با استفاده از اطلاعات به دست آمده از دو دوربین خود تصویری سه بعدی ایجاد میکند و به وسیله آن فاصله، جهت و مسیر خود با سایر ماهیهای درون مخزن آب را تعیین میکند و با استفاده از الگوریتمهای خاص برای بررسی این دادهها، این رباتها میتوانند اعمالی مانند تجمع شدن، پراکنده شدن و شنا به صورت دایره وار انجام دهند.
فلوریان برلینگر (Florian Berlinger)، دانشجوی دکترا و نویسنده اصلی مقاله میگوید: اگر ما بخواهیم رباتها دور هم جمع شوند، پس هر بلوبات باید موقعیت رباتهای اطرافش را محاسبه کند و به سمت مرکز حرکت کند. اگر بخواهیم رباتها متفرق شوند، رباتها عکس این عمل را انجام میدهند و اگر ما بخواهیم آنها به صورت گروهی و دایره وار حرکت کنند، آنها طوری برنامهریزی میشوند که در جهت عقربههای ساعت چراغهایی که دقیقا در جلوی آنهاست را دنبال کنند.
برای نمایش ویژگی انجام عملیات جستجو و نجات این فناوری، بلوباتها برنامهریزی شدند تا در آکواریوم خود پراکنده شوند، تا زمانی که یکی از آنها به اندازه کافی به یک چراغ قرمز رنگ نزدیک شود تا وجود آن را تشخیص دهد. سپس این ربات شروع به چشمک زدن LEDهای خود کرد و باعث جمع شدن بقیه Blueswarm در اطراف آن شد.
گرچه این رباتها به تنهایی قادر به نجات کسی نیستند، اما از این فناوری میتوان برای ساخت رباتهایی بزرگتر، خودمختار و با توانایی بیشتر در زیر آب استفاده کرد و همچنین میتوان آن را برای نظارت مناطق حساس محیط زیستی و همچنین مطالعهی رفتار گروهی ماهیها مورد استفاده قرار داد.
برلینگر (Berlinger) میگوید: "رباتها اغلب در مناطقی مستقر میشوند که برای انسانها غیرقابل دسترس یا خطرناک باشد، مناطقی که حتی ممکن است دخالت انسان در آن امکانپذیر نباشد. در این شرایط داشتن چنین رباتهای خودمختاری بسیار مفید است. ما توانستیم با استفاده از قابلیت ادراک بصری سه بعدی، سیستمی ایجاد کنیم که دارای درجه بالایی از استقلال و انعطاف پذیری در زیر آب باشد. جایی که در آن مواردی مانند موقعیت یاب (GPS) و شبکه اینترنت Wi-Fi در دسترس نیست.
هر ماهی با استفاده از اطلاعات به دست آمده از دو دوربین خود تصویری سه بعدی ایجاد میکند و به وسیله آن فاصله، جهت و مسیر خود با سایر ماهیهای درون مخزن آب را تعیین میکند و با استفاده از الگوریتمهای خاص برای بررسی این دادهها، این رباتها میتوانند اعمالی مانند تجمع شدن، پراکنده شدن و شنا به صورت دایره وار انجام دهند.
فلوریان برلینگر (Florian Berlinger)، دانشجوی دکترا و نویسنده اصلی مقاله میگوید: اگر ما بخواهیم رباتها دور هم جمع شوند، پس هر بلوبات باید موقعیت رباتهای اطرافش را محاسبه کند و به سمت مرکز حرکت کند. اگر بخواهیم رباتها متفرق شوند، رباتها عکس این عمل را انجام میدهند و اگر ما بخواهیم آنها به صورت گروهی و دایره وار حرکت کنند، آنها طوری برنامهریزی میشوند که در جهت عقربههای ساعت چراغهایی که دقیقا در جلوی آنهاست را دنبال کنند.
برای نمایش ویژگی انجام عملیات جستجو و نجات این فناوری، بلوباتها برنامهریزی شدند تا در آکواریوم خود پراکنده شوند، تا زمانی که یکی از آنها به اندازه کافی به یک چراغ قرمز رنگ نزدیک شود تا وجود آن را تشخیص دهد. سپس این ربات شروع به چشمک زدن LEDهای خود کرد و باعث جمع شدن بقیه Blueswarm در اطراف آن شد.
گرچه این رباتها به تنهایی قادر به نجات کسی نیستند، اما از این فناوری میتوان برای ساخت رباتهایی بزرگتر، خودمختار و با توانایی بیشتر در زیر آب استفاده کرد و همچنین میتوان آن را برای نظارت مناطق حساس محیط زیستی و همچنین مطالعهی رفتار گروهی ماهیها مورد استفاده قرار داد.
برلینگر (Berlinger) میگوید: "رباتها اغلب در مناطقی مستقر میشوند که برای انسانها غیرقابل دسترس یا خطرناک باشد، مناطقی که حتی ممکن است دخالت انسان در آن امکانپذیر نباشد. در این شرایط داشتن چنین رباتهای خودمختاری بسیار مفید است. ما توانستیم با استفاده از قابلیت ادراک بصری سه بعدی، سیستمی ایجاد کنیم که دارای درجه بالایی از استقلال و انعطاف پذیری در زیر آب باشد. جایی که در آن مواردی مانند موقعیت یاب (GPS) و شبکه اینترنت Wi-Fi در دسترس نیست.
ارسال نظرات
نظرات مخاطبان
انتشار یافته: ۱
در انتظار بررسی: ۰
ناشناس
| ۱۴:۵۰ - ۱۳۹۹/۱۰/۳۰
ایران هم انشاءالله باید وارد این صنعت بشود.